About Me
Welcome to my tech blog, where we explore the exciting world of technology and its impact on our lives. Join me as I share engaging content, personal insights, and the latest trends in the ever-evolving tech landscape.
The Subjective Nature of "Good" Code
Exploring What Defines Code Quality
Read on MediumIn a recent Medium post, I explored the nuanced world of defining what constitutes "good" code. While there are certainly universal fundamentals like code functionality, syntax adherence, and coherent structure, the specific implementations and areas of emphasis around factors like readability, maintainability, security, and performance can vary significantly across development teams.
The article argues that rather than seeking an objectively "correct" way to code, teams should focus on aligning around their own collective beliefs and priorities for how software should be built. By doing so, they can prevent conflicting notions of quality and ensure productive technical discussions.
The post provides examples of how different types of organizations approach code quality through their own distinct lenses based on their unique requirements and philosophies. It emphasizes the importance of establishing a shared vision and documenting heavily opinionated, hard-lined rules to serve as a technical roadmap and cultural foundation for all contributors to uphold.
Ultimately, the article concludes that top engineering organizations intentionally cultivate their own unique coding philosophies and progressively iterate on them to form their distinct flavor of "good" code. Regular retrospectives and process reviews allow teams to adapt their priorities as technologies and requirements evolve over an application's lifecycle.
DIY Emissions Checker
Getting started with vehicle programming can be an exciting journey, and one of the best ways to begin is by using an ELM327 device. This versatile tool allows you to communicate with a wide range of vehicles manufactured from 1998 onwards. Once you've mastered the basics of ELM327, you can explore more advanced methods of vehicle communication, such as Controller Area Network (CAN). These devices enable you to extract a wealth of information from any compatible car. In this tutorial, I'll guide you through the process of developing a simple scan tool using an ELM327 microcontroller. Our goal is to check if our car will pass emissions testing, saving us a potentially wasted trip to the testing facility. For this project, we'll be using C# and .NET, as they provide a great balance between abstraction and hardware device handling. To get started, you'll need a wired ELM327 device, which can be easily purchased from online marketplaces like Amazon. While it's possible to adapt the code to work with Bluetooth, it's important to consider your target platform, as Bluetooth code is often not compatible across different systems. Most of the code will remain the same, but you'll need to make some modifications to accommodate Bluetooth functionality. This can be more challenging than it initially appears, which is why we've chosen to focus on the wired version in this tutorial.
How To Build A Renderer from Scratch. Well sort of ...
Introduction
My fascination with computers began with video games during my childhood, right when 3D graphics acceleration was in its infancy. I was captivated by the way virtual worlds could be brought to life on screen, allowing for interactive experiences. Since then, the industry has evolved tremendously, with countless innovations. For this project, I set out to challenge myself by learning how 3D graphics work at a low level, not realizing the ambitious nature of this undertaking.
Linear Algebra Review
Before diving into the project, I needed to refresh my knowledge of linear algebra concepts that I hadn't used in over a decade. This included vectors, matrices, and trigonometry. Although it was mostly a review, I made sure to gain a thorough understanding of these concepts, as they would be directly applied in my rendering system. Taking the time to solidify my linear algebra foundation was crucial for the success of the project.
Choosing a Graphics API
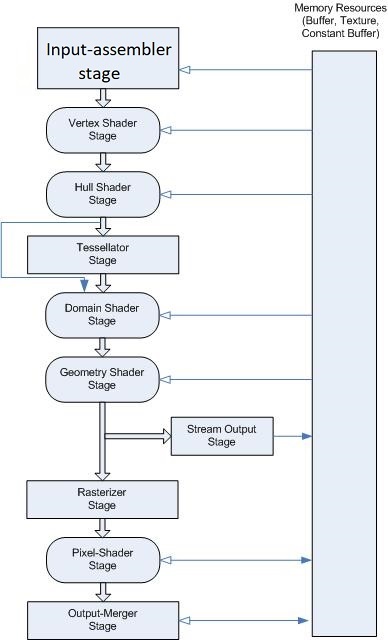
One of the key decisions I had to make was choosing a graphics API. Graphics APIs provide a way for programmers to design a graphics pipeline, which can be thought of as an assembly line that takes raw data and transforms it into a frame displayed on the screen. There are numerous graphics APIs available, each with its own intricacies and workflows. After careful consideration, I chose DirectX due to its widespread popularity and Microsoft's comprehensive documentation. However, it's worth noting that DirectX has fewer tutorials and code samples compared to alternatives like OpenGL. For beginners, I would recommend starting with OpenGL unless they have a specific reason to learn DirectX.
Code Modularization
As I progressed with the project, I quickly realized the importance of modularizing my codebase. 3D rendering codebases can grow very large, very quickly. To manage this complexity, I had to structure my code in a way that was organized, reusable, and maintainable. This involved creating separate modules for different components of the rendering pipeline, such as shader management, model loading, and scene graph handling. By keeping the codebase modular, I could more easily debug issues, add new features, and optimize performance.
Learning Resources
While online resources can be helpful, I found that books were invaluable for learning DirectX and 3D graphics concepts. Two books that I highly recommend are "3D Game Programming" by Frank Luna and "Real-Time 3D Rendering with DirectX 11" by Paul Varcholik. These books provide in-depth explanations of core concepts and offer practical examples to reinforce understanding. They helped me grasp the intricacies of DirectX and guided me through the process of building a rendering pipeline from the ground up.
Rendering Pipeline
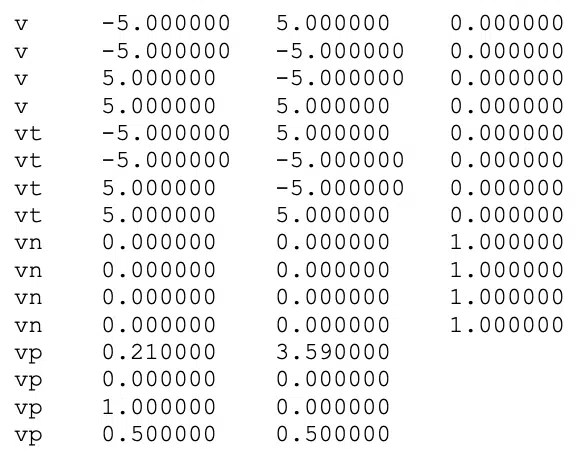
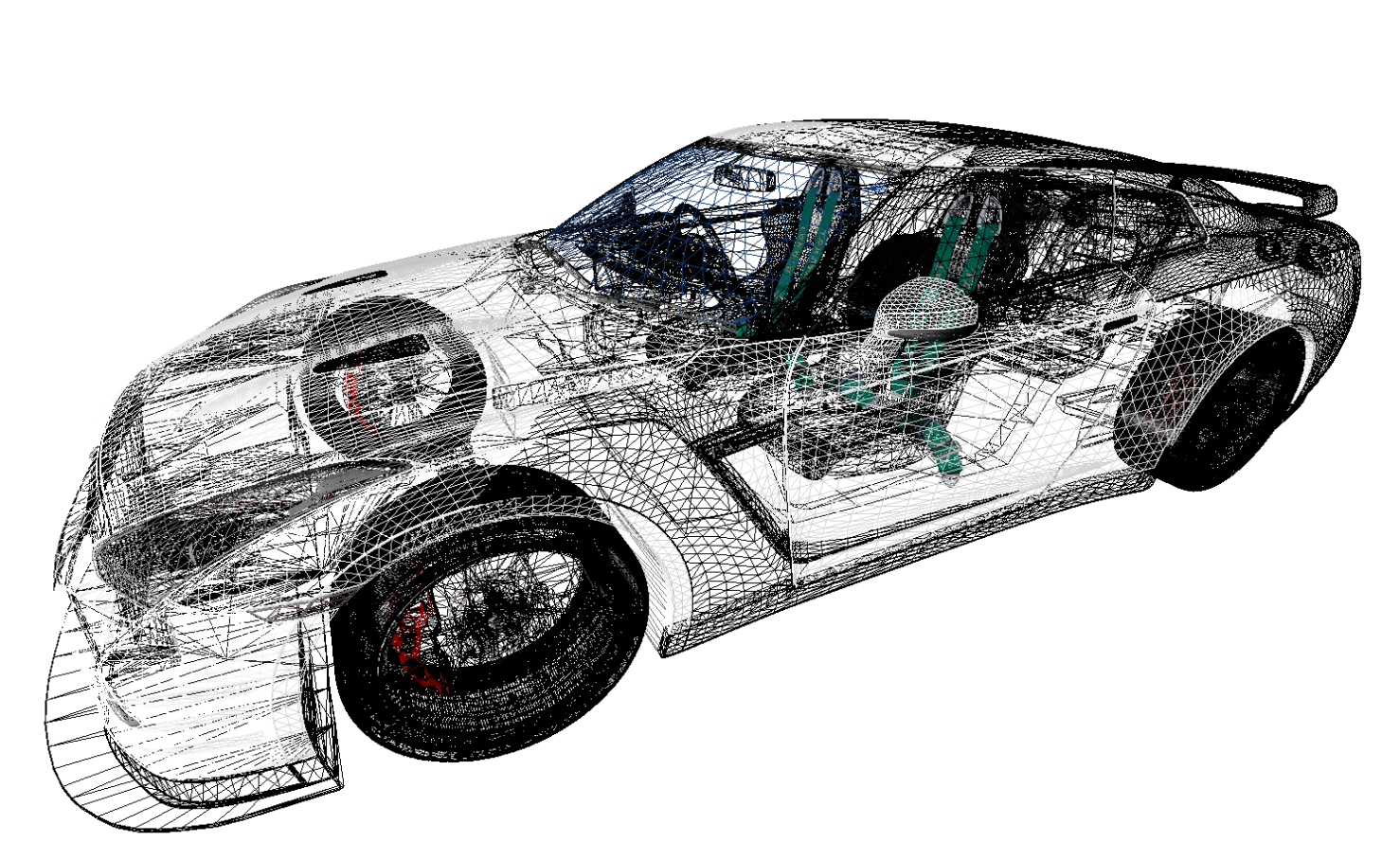
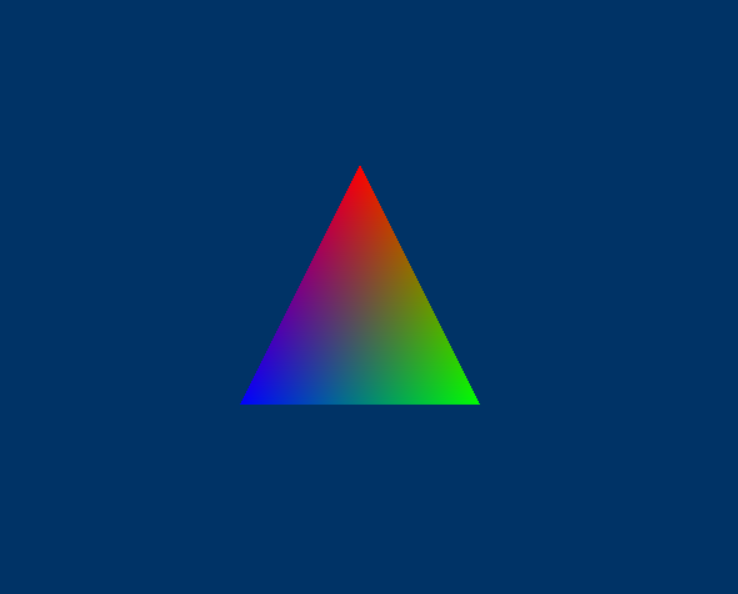
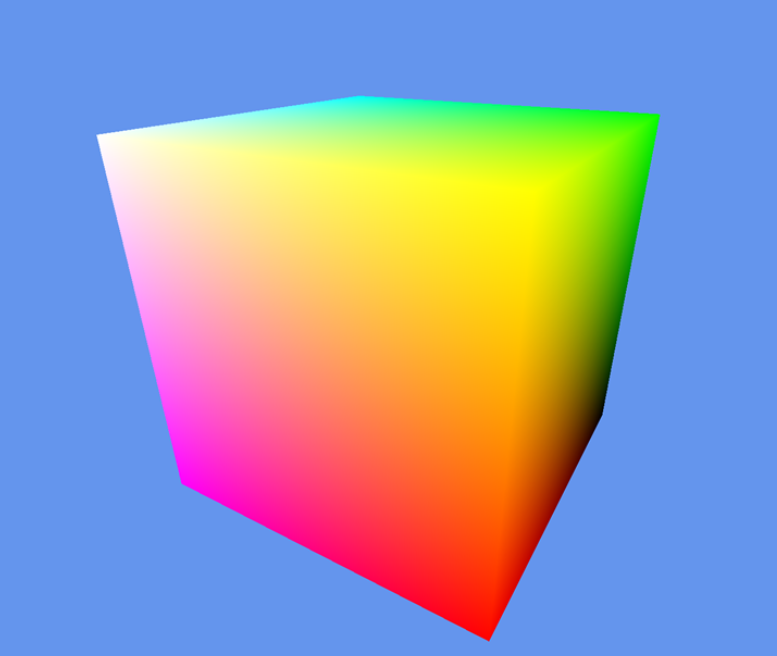
Building the rendering pipeline was an incremental process. I started by creating a simple pipeline that rendered a solid red screen, just to ensure that the basic setup was working correctly. From there, I progressively added more complexity, moving on to rendering a basic triangle, then a cube, and so on. Each step brought new challenges and learning opportunities. When it came to handling 3D models, I discovered that it often requires using a library to parse common model file formats. However, I still needed to structure the model data hierarchically, breaking it down into components like Model, Meshes, and Materials.



Virtual Camera
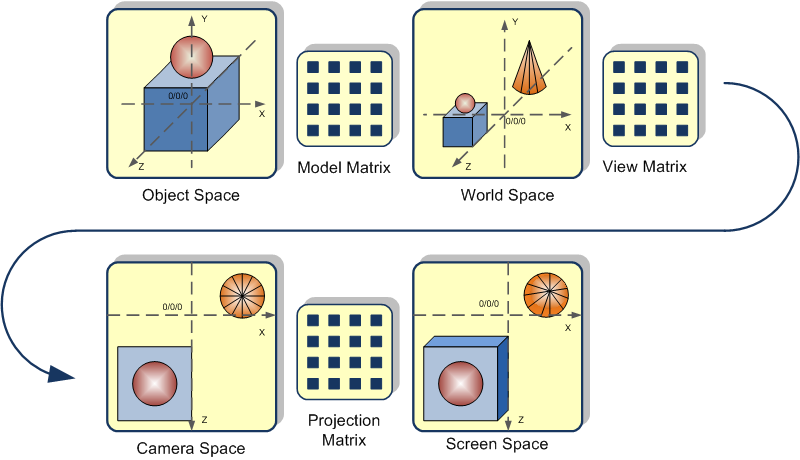
One of the most satisfying milestones in the project was creating a movable virtual camera. This was the moment when I could finally navigate through the virtual 3D space I had created. The core concept behind a virtual camera is relatively simple. Each vertex of a triangle is multiplied against a ModelViewProjection matrix, which yields the 2D screen coordinates for that vertex. The matrix needs to be regenerated each frame or whenever the camera moves. I created vectors representing the camera's position and orientation, and as those values changed, the matrix was updated to transform the vertices accordingly. Implementing the virtual camera gave me a sense of presence within the 3D scene and opened up new possibilities for exploration and interaction.
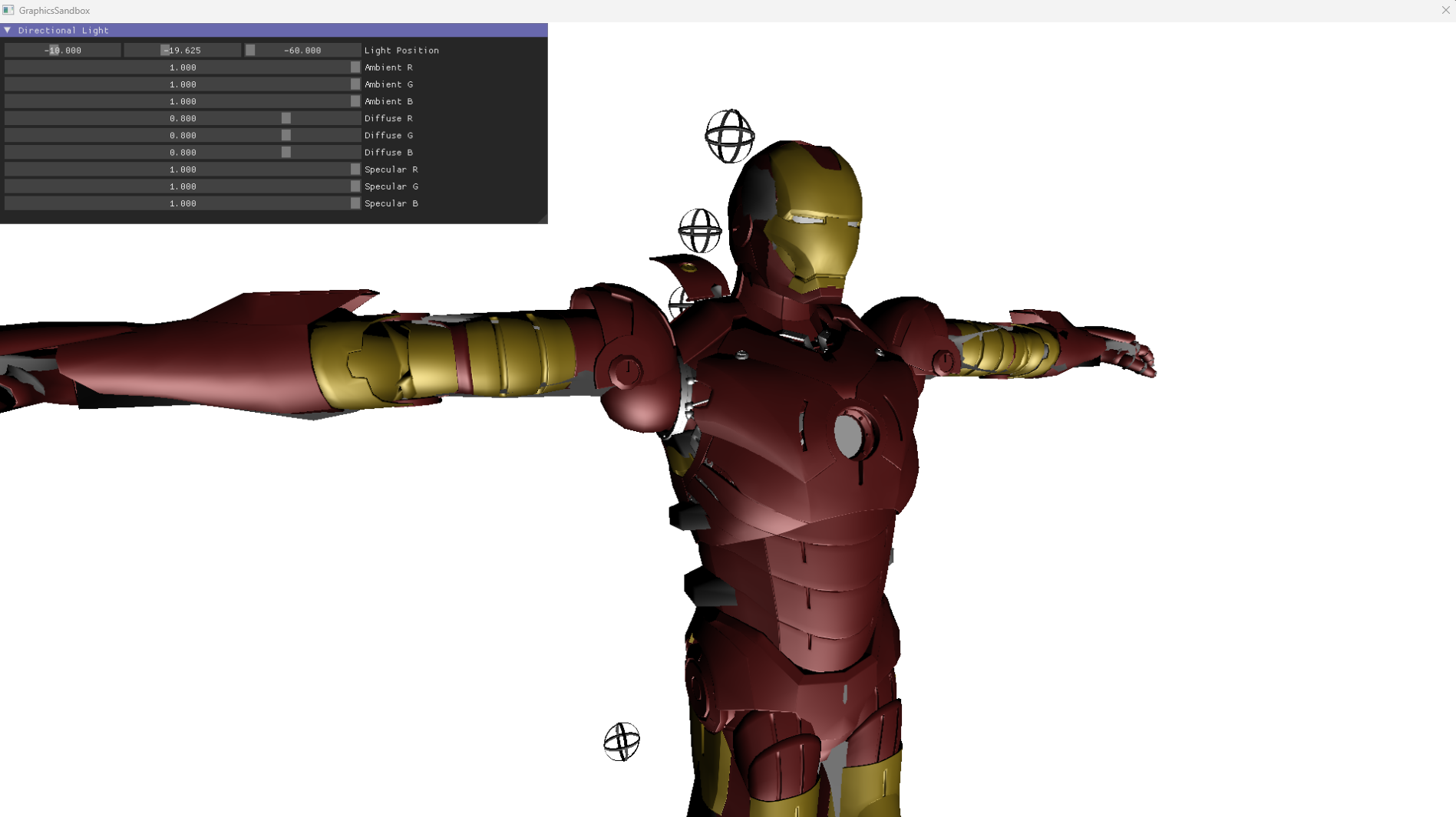
Lighting
Implementing lighting was another gratifying challenge. To achieve realistic lighting, I researched various lighting models and decided to implement the popular Phong reflection model. This model takes into account ambient, diffuse, and specular lighting components to calculate the final color of each pixel. By carefully tuning the parameters of the Phong model, I was able to achieve a range of lighting effects, from soft and subtle to bright and dramatic. Seeing the 3D scene come to life with proper lighting was a rewarding experience and added a new level of depth and realism to the rendering.

VR Integration
Integrating VR support for my Oculus Quest 2 headset was an exciting venture that took the project to new heights. I used Valve's OpenVR SDK to handle the VR integration. Rendering for a VR headset is similar to rendering to a monitor, with the main difference being that you have two render targets, one for each eye. OpenVR provides the necessary ModelViewProjection matrices based on the headset's position and orientation, allowing for accurate stereoscopic rendering. Although implementing VR support was not the most straightforward task, it was certainly achievable with persistence and careful study of the OpenVR documentation. The ability to walk around the virtual scene in true 1:1 scale, as if I were physically present, was an awe-inspiring experience that made all the effort worthwhile.
Conclusion
Undertaking the challenge of building my own 3D renderer was an incredibly fun and rewarding experience, despite the significant time investment and occasional feelings of slow progress. It's important to recognize that creating a full-featured renderer from scratch is a monumental task, and established engines like Unreal, Unity, and Blender have massive codebases developed by large teams of experts.
However, the benefits of building your own basic renderer are immense. It provides a deep understanding and appreciation of the underlying principles and techniques used in 3D graphics. This knowledge empowers you to modify and optimize existing engines more effectively. For example, learning HLSL allowed me to write custom shaders that completely transformed the visual style of an existing renderer.
To anyone who is curious and willing to embark on a challenging but rewarding project, I wholeheartedly recommend building your own 3D renderer. The knowledge and skills you acquire along the way are invaluable and will serve you well in various aspects of computer graphics and software development.
Remember, the journey may be long and sometimes frustrating, but the satisfaction of seeing your virtual world come to life makes it all worthwhile. Embrace the challenge, stay curious, and never stop learning. The world of 3D graphics is vast and ever-evolving, and building your own renderer is just the beginning of an exciting adventure.
Prompts
Prompts is a Flutter UI control designed to guide users through a series of prompts and collect their responses.
Prompts works on IOS, Andorid, Web & wherver else flutter runs!
Github LinkPixelated
Pixelated is a user-friendly tool that simplifies the process of flashing images on Pixel devices. With just a few clicks, users can easily install stock or custom images on their supported Pixel devices. This repository and all branches are experimental for now.
Github Link